第一次模擬→ 失敗
遇到問題:
因為我們是設計螺旋線的上升機構, 所以到輸送平台時把它用直線,導致不符合公差尺寸而跑掉
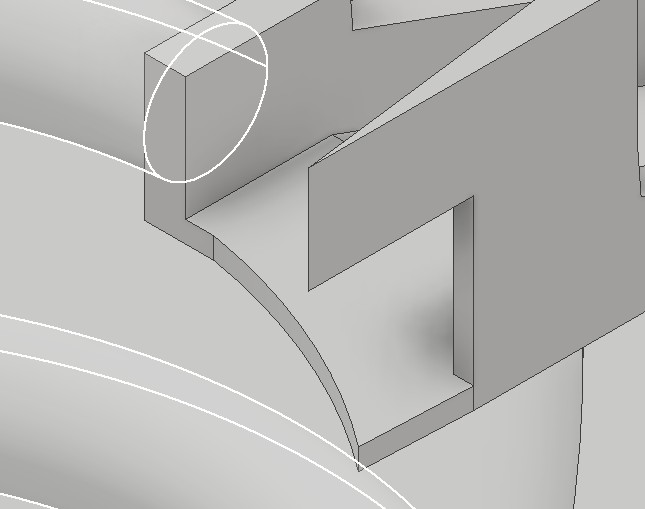
解決1. 改善後 把它改成符合螺旋線的入口
改善前
改善後
Copyright © All rights reserved | This template is made with by Colorlib