機器人學 <<
Previous Next >> 逆向運動學
正向運動學
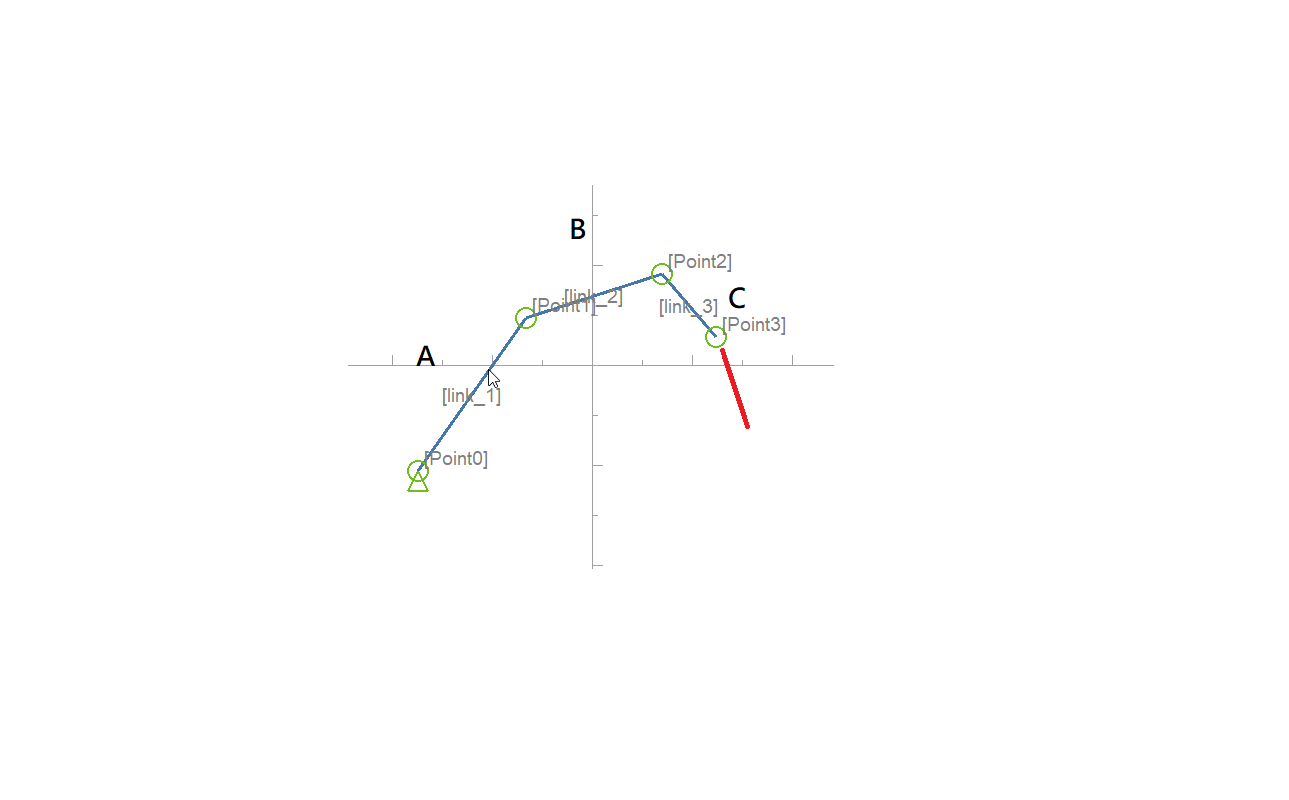
上圖為一個多軸的機械手臂簡圖,若要控制此機械臂可藉由控制每個joint的角度,使夾爪(point3)產生紅色線條的路徑。也就是說,利用每個關節的角度控制來達到終端(夾爪)的目標位置。想像現在你面前有個杯子,他在手臂的正45度處,你想拿起這個杯子,你可以手彎45度拿到這個杯子,就是正向運動學的概念。
正向運動學裡,你可以控制每一個關節的角度,所以對於動作掌握上是百分之百的,但是IK只能確保到目標點,不能掌握動作,而正向運動學因為要控制每個角度,所以計算上較為困難,所以各有利弊
機器人學 <<
Previous Next >> 逆向運動學