正向運動學 <<
Previous Next >> Program
逆向運動學
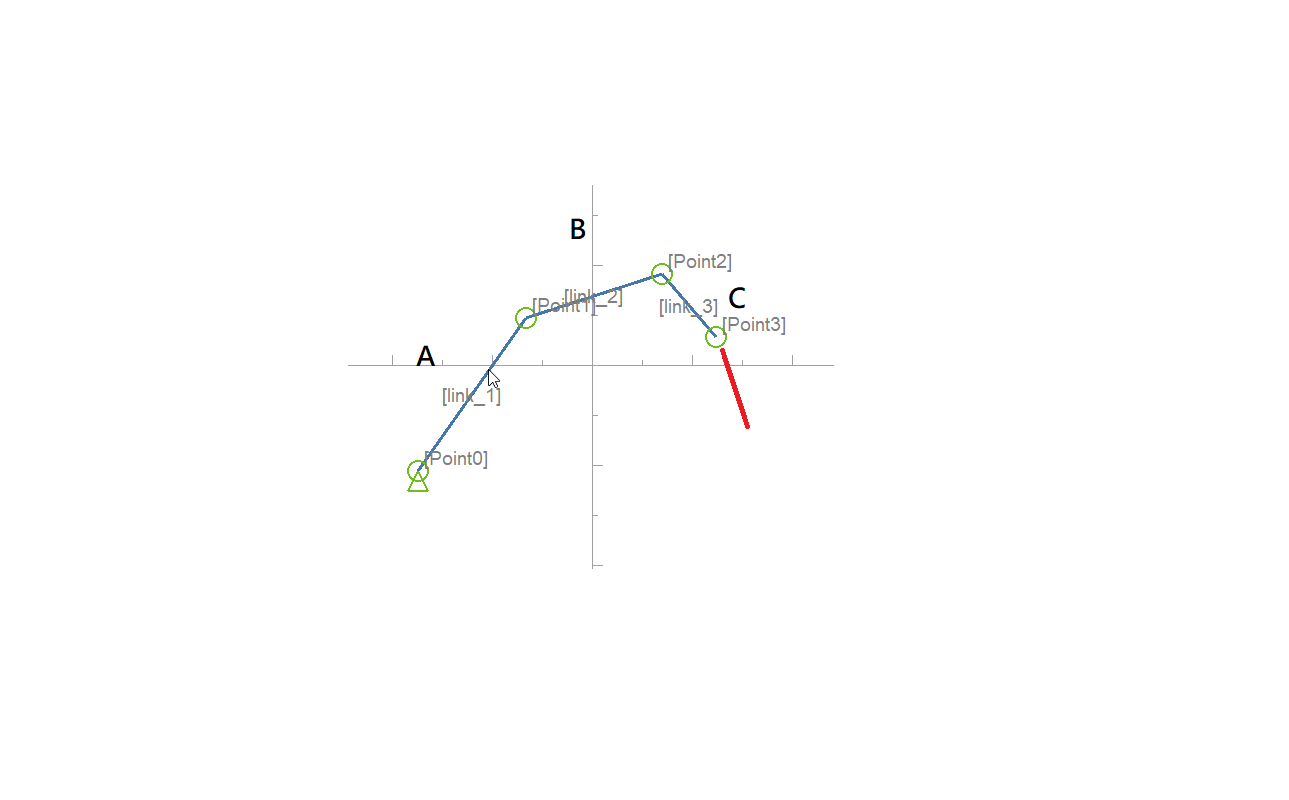
上圖為一個多軸機械手臂的簡圖,紅色部分是移動路徑路徑。想像有個杯子,你的左邊20公分、前面15公分出,你想拿起這個杯子,你的腦袋會告訴你,你現在手臂必須彎曲一個角度才能拿到這個杯子,現在,給予夾爪一個坐標(目的地座標),是否其他關節能自己推敲出座標與角度,此概念即逆向運動學。
逆向運動學方便且快速,可以減少很多計算時間,尤其在三維空間中!但是正如上面所舉的例子,你的手想拿杯子,可以從左邊拿、從上面拿、側邊拿,不管任何一個方式都能到杯子的位置,也就是說,IK的控制沒辦法像順向(正向)運動學一樣精準,想控制每個角度都行,因為角度是從座標逆推出來的,而N種角度都能到這個座標,所以像是些有限空間或是極度精準的控制就需考慮用正向運動學。
正向運動學 <<
Previous Next >> Program